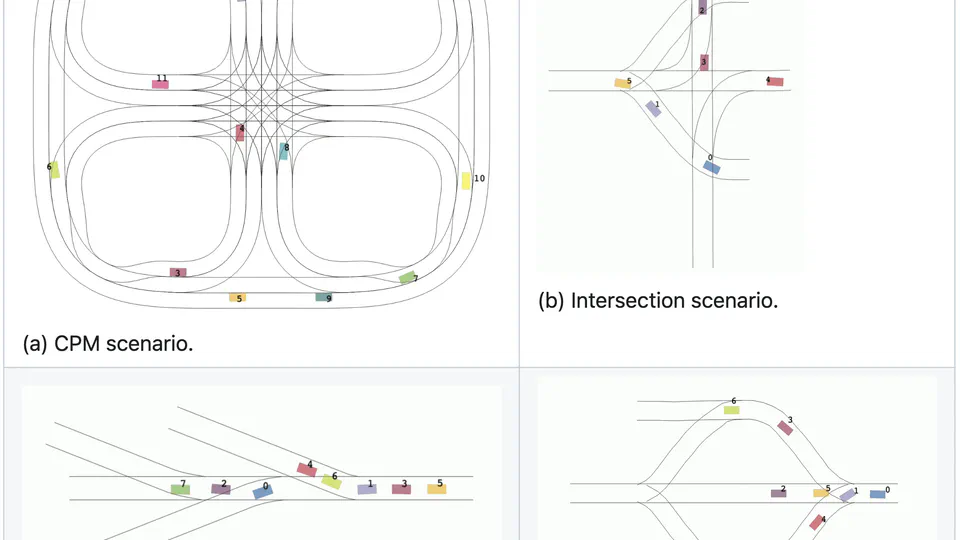
Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms This project aims to advance the development of small-scale testbeds for Connected and Automated Vehicles (CAVs) and robot swarms. The design and validation of algorithms for CAVs or robot swarms often necessitate computer simulations and/or full-scale experiments. Small-scale testbeds aim to combine the merits of both to enable rapid prototyping while approximating real-world conditions more closely than mere simulations.
Multi-Agent Reinforcement Learning and its Applications in Connected and Automated Vehicles This project addressed the challenges in Multi-Agent Reinforcement Learning (MARL) and its applications in Connected and Automated Vehicles (CAVs).
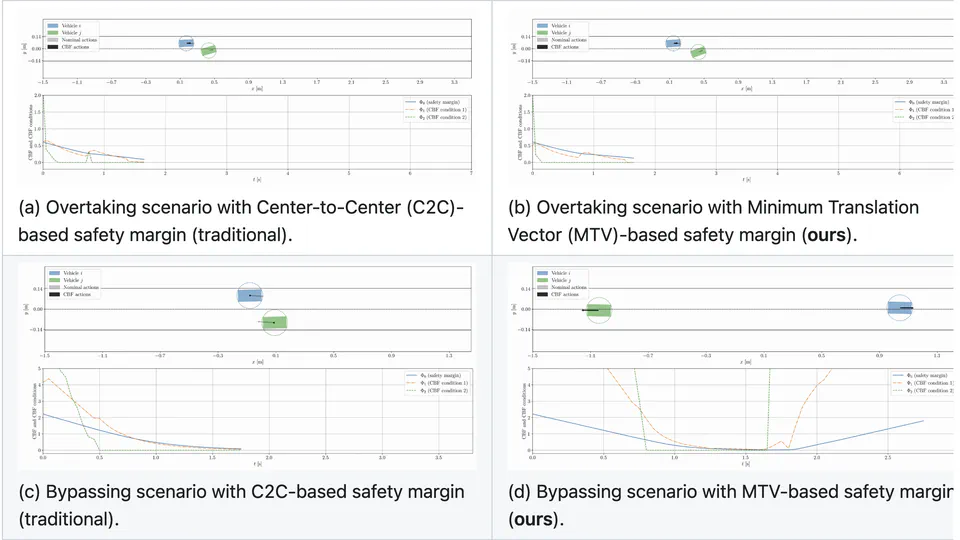
Control Barrier Functions for Safe Reinforcement Learning This project studies the theoretical and practical aspects of Control Barrier Functions (CBFs) for safe reinforcement learning in the context of Connected and Automated Vehicles (CAVs).